原始的GAN存在的很多问题,例如,没有给出具体的模型架构(主要是生成器),训练并不稳定等。后面提出的很多gan的改进模型都是围绕上面两个问题进行改进。
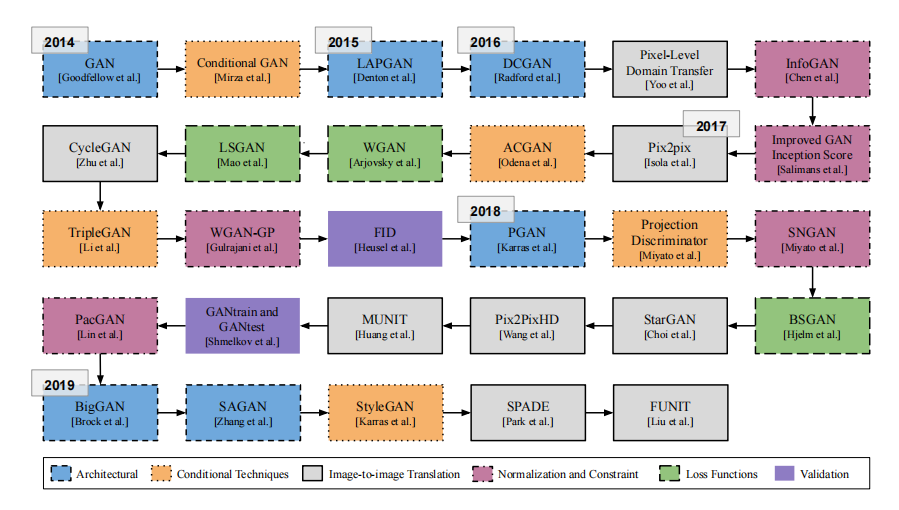
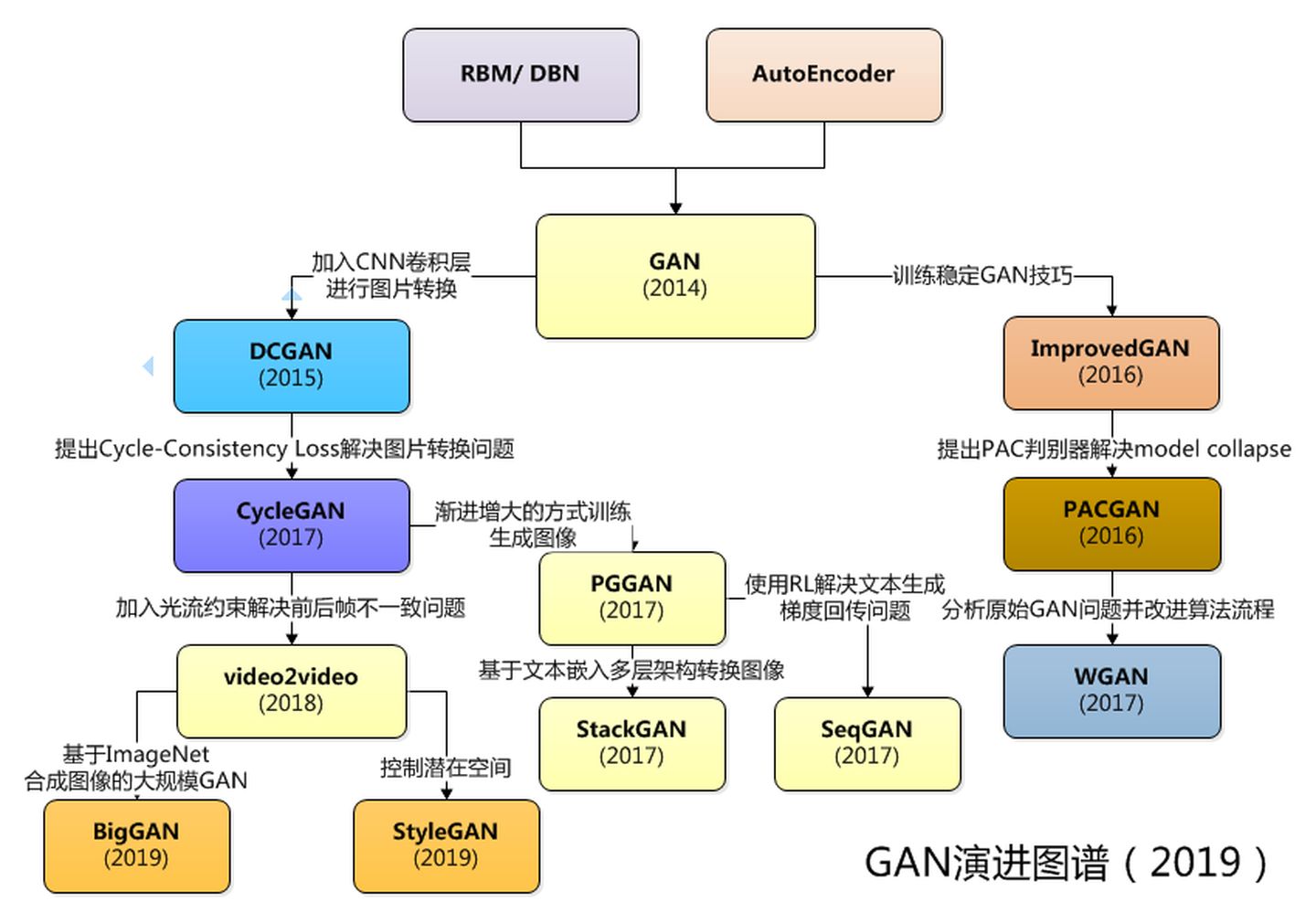
先给出两张GAN的演变史图片
这里还有一个收集了很多已提出的GAN网络的git仓库
下面挑一些个人认为比较典型突出的改进工作进行学习
1. CGAN
2014年的论文:Conditional Generative Adversarial Nets
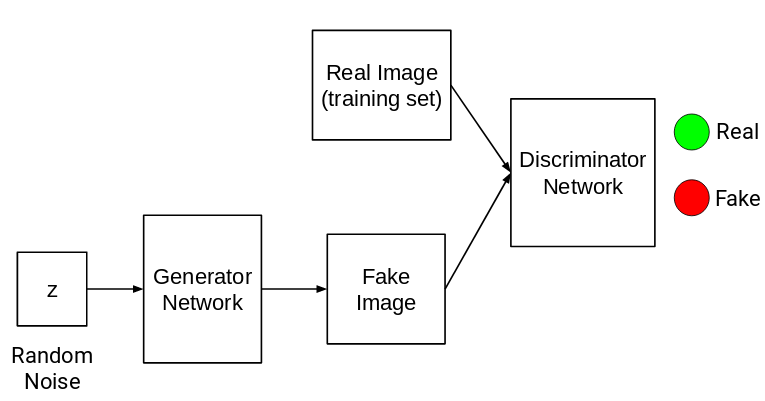
网络结构图
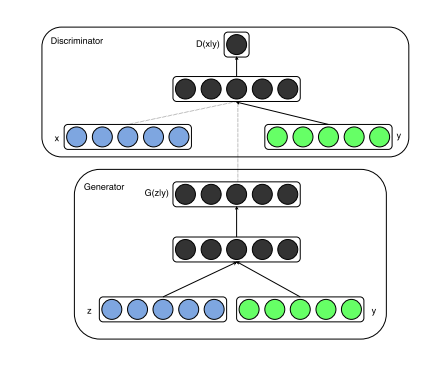
原始GAN的生成内容仅和生成器的参数和随机噪声有关,为了增强其结果的可控性,CGAN在判别器和生成器的输入中都加入一个条件变量 \(y\) ,这个条件变量通常是一些标签数据,所以该模型可以属于有监督的模型。
此时,生成器和判别器的输入分别变为 \(G(\boldsymbol{z} \mid \boldsymbol{y}))\) 和 \(D(\boldsymbol{x} \mid \boldsymbol{y})\),模型的目标函数变为 \[ \min _G \max _D V(D, G)=\mathbb{E}_{\boldsymbol{x} \sim p_{\text {data }}(\boldsymbol{x})}[\log D(\boldsymbol{x} \mid \boldsymbol{y})]+\mathbb{E}_{\boldsymbol{z} \sim p_z(\boldsymbol{z})}[\log (1-D(G(\boldsymbol{z} \mid \boldsymbol{y})))] \]
2. DCGAN
2015年的论文:Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks
网络结构图
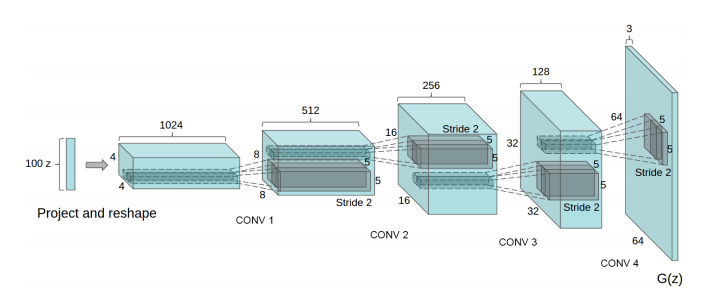
这篇论文最大的贡献就是提出了一个稳定通用的GAN基础架构,虽然现在看来,往模型中加入CNN网络,好像是很自然平常的事情,但在当时也是一件开创性的事件,因为其证明了GAN在图像生成任务上的可能性。
还有一些小的改进,这里也简单一提,包括,
- 取消池化层,判别器用带步长的卷积层代替,以及生成器用带分数步长(fractional-strided)代替;取消全连接层
- 生成器和判别器都采用batch norm
- 生成器除输出层使用tanh,其他层使用ReLU;判别器使用LeakyReLU
3. ImprovedGAN
NIPS 2016年的论文(Ian Goodfellow的续作):Improved Techniques for Training GANs
官方代码:https://github.com/openai/improved-gan
论文中认为,仅靠梯度下降法,只能找到较低的损失点,但很难达到纳什均衡。所以论文提出了一些使收敛更加稳定的技巧
3.1. Feature matching
生成器优化过程中,从极大化 \(\mathbb{E}_{\boldsymbol{z} \sim p_{\boldsymbol{z}}(\boldsymbol{z})} \mathbf{f}(G(\boldsymbol{z}))\) 改为极小化 \[ \left\|\mathbb{E}_{\boldsymbol{x} \sim p_{\text {data }}} \mathbf{f}(\boldsymbol{x})-\mathbb{E}_{\boldsymbol{z} \sim p_{\boldsymbol{z}}(\boldsymbol{z})} \mathbf{f}(G(\boldsymbol{z}))\right\|_2^2 \]
论文认为这样做可以使生成数据更加接近真实数据的分布,该思想可能来源于MMD距离。
最后,作者还提到,上式会有一个最优的固定点,使得生成数据和真实数据分布一致,但并不保证一定能找到,但确实有效(好像讲了什么,但好像又什么没讲,反正就是证明不了,但你尽管用就是了)
3.2. Minibatch discrimination
GAN模型中存在名为模式坍塌(mode collapse)的问题,即生成器生成的图像虽然很像真实图像,但非常单一,来来去去都只有一两张图片。
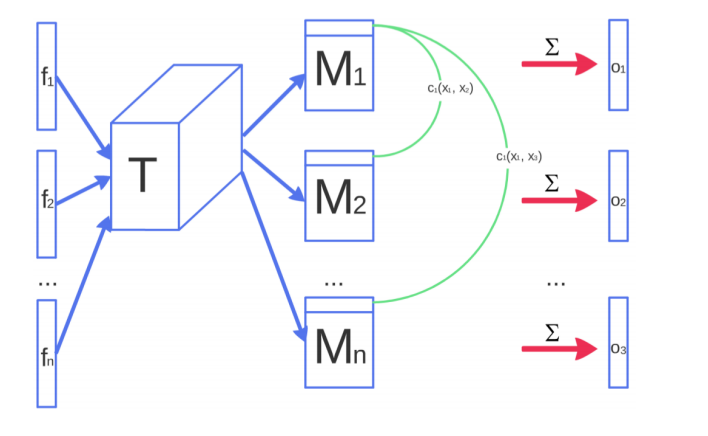
为了缓解这个问题,论文中将判别器中单个样本输入,改为一个batch输入。但与传统的Minibatch不一样,论文中对每个batch中样本做了一些融合处理。具体步骤如下:
- 每个batch有 \(n\) 个样本,样本 \(x_i\) 对应的向量为 \(f(x_i) \in \mathbb{R}^A\)
- 将 \(f(x_i)\) 与一个张量 \(T \in \mathbb{R} ^{A \times B \times C}\) 相乘,得到张量 \(M_i \in \mathbb{R}^{B \times C}\)
- 对 \(M\) 的每一个样本对应行两两求L1距离,得 \(c_b\left(\boldsymbol{x}_i, \boldsymbol{x}_j\right)=\exp \left(-\left\|M_{i, b}-M_{j, b}\right\|_{L_1}\right) \in \mathbb{R}\)
- 求和,得 \(o\left(\boldsymbol{x}_i\right)_b =\sum_{j=1}^n c_b\left(\boldsymbol{x}_i, \boldsymbol{x}_j\right) \in \mathbb{R}\)
- 拼接,得 \(o\left(\boldsymbol{x}_i\right) =\left[o\left(\boldsymbol{x}_i\right)_1, o\left(\boldsymbol{x}_i\right)_2, \ldots, o\left(\boldsymbol{x}_i\right)_B\right] \in \mathbb{R}^B\)
- 最终有 \(o(\mathbf{X}) \in \mathbb{R}^{n \times B}\)
结构图如下
3.3. Historical averaging
生成器和判别器的目标函数中均加入一个正则项 \[ \left\|\boldsymbol{\theta}-\frac{1}{t} \sum_{i=1}^t \boldsymbol{\theta}[i]\right\|^2 \]
该正则项常应用在在线学习中。
这个正则项的特点是一个与迭代次数相关的函数,模型参数可以在长时间内受到尺度约束,作者希望模型在学习新的样本数据时不要忘记之前样本学习的经验
3.4. One-sided label smoothing
通过
\[ D(\boldsymbol{x})=\frac{\alpha p_{\text {data }}(\boldsymbol{x})+\beta p_{\text {model }}(\boldsymbol{x})}{p_{\text {data }}(\boldsymbol{x})+p_{\text {model }}(\boldsymbol{x})} \]
对判别器中真实样本输出乘 \(\alpha\) ,生成样本输出乘 \(\beta\),即将 \(\{0, 1\}\) 硬标签转化为 \([\beta,\alpha]\) 的软标签,使模型训练更加soft,属于分类器训练常用的trick了
3.5. Virtual batch normalization
论文认为梯度下降非常依赖每个batch的样本分布,而一个batch的分布可能并不能反映整体的分布。
为了缓解这个问题,论文在开始训练前,挑选一组固定的参考样本(reference batch),将其与每个batch耦合后,再计算均值和标准差,将分布拉回原始数据分布。有点类似于残差结构的思想。
但这个方法计算成本太高,所以论文只在生成器中运用。
3.6. Semi-supervised learning
原始GAN是无监督的,其判别器是一个一维向量,只能判别样本是否为真。
论文对其扩展至 \(K + 1\) 维向量,使其可以应用于部分打标样本的半监督场景。其中,已打标的样本对应一个 \(K\) 类的分类任务;而未打标的样本对应最后 \(1\) 维正例样本,生成器输出的样本对应其负例样本。
损失函数如下 \[ \begin{aligned} \mathcal{L} &=-\mathbb{E}_{\boldsymbol{x}, y \sim p_{\text {data }}(\boldsymbol{x}, y)}\left[\log p_{\text {model }}(y \mid \boldsymbol{x})\right]-\mathbb{E}_{\boldsymbol{x} \sim G}\left[\log p_{\text {model }}(y=K+1 \mid \boldsymbol{x})\right] \\ &=\mathcal{L}_{\text {supervised }}+\mathcal{L}_{\text {unsupervised }} \\ \mathcal{L}_{\text {supervised }} &=-\mathbb{E}_{\boldsymbol{x}, y \sim p_{\text {data }}(\boldsymbol{x}, y)} \log p_{\text {model }}(y \mid \boldsymbol{x}, y<K+1) \\ \mathcal{L}_{\text {unsupervised }} &=-\left\{\mathbb{E}_{\boldsymbol{x} \sim p_{\text {data }}(\boldsymbol{x})} \log \left[1-p_{\text {model }}(y=K+1 \mid \boldsymbol{x})\right]+\mathbb{E}_{\boldsymbol{x} \sim G} \log \left[p_{\text {model }}(y=K+1 \mid \boldsymbol{x})\right]\right\} \end{aligned} \] 令 \(D(\boldsymbol{x})=1-p_{\text {model }}(y=K+1 \mid \boldsymbol{x})\),\(L_{\text {unsupervised }}\) 就是原始GAN判别器的损失函数了
4. WGAN
2017年的论文:
参考文章:https://zhuanlan.zhihu.com/p/25071913
代码实现:
作者用了两篇论文来介绍WGAN,其中第一篇主要分析原始GAN的问题,第二篇才正式推出GAN
4.1. 随机噪声
这是第一篇论文给出的一个解决方案
作者认为,在通常情况下,高维空间中自然分布的两个曲面(真实样本和生成样本就可以看作是这样的两个曲面)不重叠或重叠可忽略(即不相关?)的概率很大,所以一定存在一个曲面将其分隔开,考虑到神经网络超强的拟合能力,随着训练的迭代,必然会得到一个训练很好的判别器。
当判别器为最优判别器时,此时生成器的损失函数可以看做是一个简单的 \(J S D\left(\mathbb{P}_{r} \| \mathbb{P}_{g}\right)\) 。而当两个分布不重叠或重叠可忽略时,JS函数的梯度趋近于0。所以当判别器训练得越好时,生成器就越难继续往下迭代。
对此,作者分别向真实样本和生成样本中添加随机噪声,其分布分别为 \(\mathbb{P}_{r+\epsilon}\) 和 \(\mathbb{P}_{g+\epsilon}\)。这样做可以使两个分布产生一些不可忽略的重叠,一方面使其更难找到最优的判别器,另一方面由于重叠不可忽略,所以生成器的反向梯度也不为0
添加噪声后的损失函数变为 \[ W\left(\mathbb{P}_r, \mathbb{P}_g\right) \leq 2 V^{\frac{1}{2}}+2 C \sqrt{J S D\left(\mathbb{P}_{r+\epsilon} \| \mathbb{P}_{g+\epsilon}\right)} \\ where \quad V=\mathbb{E}\left[\|\epsilon\|_2^2\right] \]
4.2. Wasserstein距离
Wasserstein距离又叫Earth-Mover(EM,推土机)距离,其原始表达式如下
\[ W\left(\mathbb{P}_r, \mathbb{P}_g\right)=\inf _{\gamma \in \Pi\left(\mathbb{P}_r, \mathbb{P}_g\right)} \mathbb{E}_{(x, y) \sim \gamma}[\|x-y\|] \] 其中,
- \(\Pi\left(\mathbb{P}_r, \mathbb{P}_g\right)\) 表示随机分布 \(\mathbb{P}_r\) 和 \(\mathbb{P}_g\) 组合起来的所有可能的联合分布的集合
- \(\inf\) 表示函数的下界
- x,y在这里分别表示真实样本和生成样本
上式的含义是,遍历所有的 \(\gamma \in \Pi\left(\mathbb{P}_r, \mathbb{P}_g\right)\) ,通过采样 \((x, y) \sim \gamma\) ,计算xy距离 \(\|x-y\|\) 的期望,最后求取所有的 \(\gamma\) 对应的期望的最小值
Wasserstein距离对比JS距离或者KL距离,一个很重要的特性是,当两个分布没有重叠时,JS距离或者KL距离是一个不可微的分段常量函数,而Wasserstein距离大概率仍是一个可微的平滑函数。
又通常情况下,真实样本分布和生成样本分布不重叠或重叠可忽略的概率很大,所以基于JS散度的损失函数很容易发散。
但由于 \(\inf _{\gamma \in \Pi\left(\mathbb{P}_r, \mathbb{P}_g\right)}\) 无法直接求导,所以论文对其进行了如下变换 \[ W\left(\mathbb{P}_r, \mathbb{P}_\theta\right)=\sup _{\|f\|_L \leq K} \mathbb{E}_{x \sim \mathbb{P}_r}[f(x)]-\mathbb{E}_{x \sim \mathbb{P}_\theta}[f(x)] \]
其中,
- \(\|f\|_L\) 表示函数 f 的Lipschitz常数
- \(\sup\) 表示函数的上界
引入超参数 \(w\) 替换,用weight clipping来使 \(f_w\) 满足Lipschitz,上式进一步改造为 \[ K W\left(\mathbb{P}_r, \mathbb{P}_\theta\right) \approx \max _{w \in \mathcal{W}} \mathbb{E}_{x \sim \mathbb{P}_r}\left[f_w(x)\right]-\mathbb{E}_{z \sim p(z)}\left[f_wg_\theta(z)\right] \] 只保留右侧表达式,即可得WGAN的损失函数 \[ \mathcal{L} = \mathbb{E}_{x \sim \mathbb{P}_r} \left[f_w(x)\right]-\mathbb{E}_{z \sim p(z)}\left[f_wg_\theta(z)\right] \] 其中,
- 生成器的损失函数为 \(-\mathbb{E}_{z \sim p(z)}\left[f_wg_\theta(z)\right]\)
- 判别器的损失函数为 \(\mathbb{E}_{z \sim p(z)}\left[f_wg_\theta(z)\right] - \mathbb{E}_{x \sim \mathbb{P}_r} \left[f_w(x)\right]\)
可以发现,其最终形式很简单,就是比原始GAN少了log计算
注,上面详细推导见论文的附录
作者认为原始GAN的损失函数的值无法作为模型效果的指标,而WGAN的损失函数的值可以作为模型效果的指标。
最终参数更新过程如下
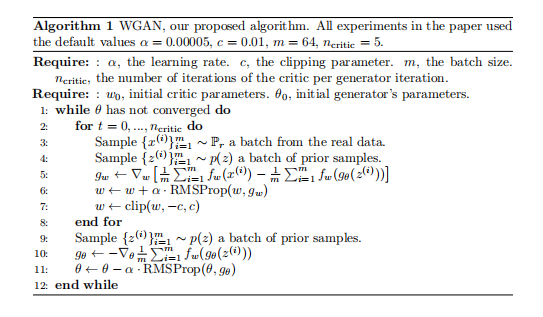
注:作者还认为,基于动量的优化算法给出的更新方向容易与梯度方向的夹角的cos值变成负数,导致迭代不稳定,所以尽量不要使用基于动量的优化算法(如Adam)或者使用很高的学习率
最后,作者还通过实验说明,WGAN并没有出现模式坍塌的问题
在这篇博客WGAN的成功,可能跟Wasserstein距离没啥关系中,作者对“WGAN的成功归功于Wasserstein距离”这一观点产生了质疑
5. Pix2pix
2017年的论文:Image-to-Image Translation with Conditional Adversarial Networks
代码实现:
模型结构
这篇论文最大的贡献是提出了一个统一的框架解决了图像翻译问题(输入一张图片,输出另外一张相关的图片,例如风格迁移就是其中一类典型的图像翻译任务)
5.1. CGAN
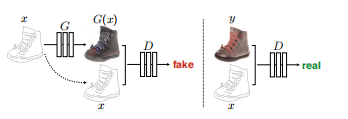
Pix2pix是基于CGAN的改进,其训练需要一组两张翻译前后的图片。
生成器输入为翻译前的样本 \(x\) 和噪声 \(z\) (上面的结构图中省去噪声 \(z\) ,是因为在实际实验中,噪声往往被淹没在条件当中,所以就直接省去了);判别器的输入为翻译前的样本 \(x\) 和 生成器输出 \(G(x)\) / 翻译后的样本 \(y\)
Pix2pix的损失函数就是在CGAN的基础上加入一个正则项,即 \[ \begin{aligned} \mathcal{L} &= \mathcal{L}_{cGAN} + \mathcal{L}_1 \\ &= \mathbb{E}_{\boldsymbol{x} ,\boldsymbol{y}}[\log D(\boldsymbol{x} ,\boldsymbol{y})]+\mathbb{E}_{\boldsymbol{x} ,\boldsymbol{z}}[\log (1-D(G(\boldsymbol{x} , \boldsymbol{z})))] + \mathbb{E}_{(\boldsymbol{x} ,\boldsymbol{y},\boldsymbol{z})}[\|\boldsymbol{y} - G(\boldsymbol{x},\boldsymbol{z})\|] \end{aligned} \]
5.2. U-net
来自2015的论文:U-Net: Convolutional Networks for Biomedical Image Segmentation
模型结构:
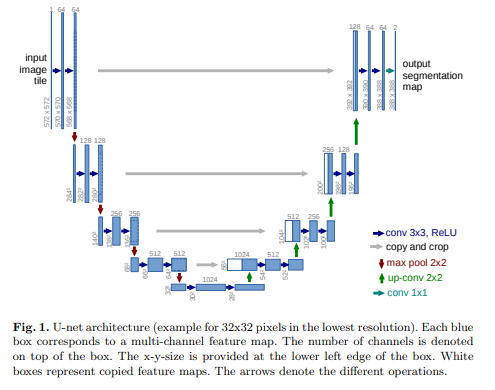
这是一个和FPN很像的结构,两者的差异:
- FPN用于图像检测,U-net用于图像分割
- FPN有多个预测输出,U-net只有一个
- FPN的特征图融合是直接相加,U-net是沿通道方向直接拼接在一起
论文将U-net应用到了模型的生成器中
5.3. PatchGAN
论文认为判别器输入的图像的分辨率太高,导致判别器太弱,以至于无法生成清晰的图片。
所以论文将判别器的输入图像分成 N×N 个图像块(Patch),然后再分批进行预测,最后将所有Patch的Loss求平均作为最终的Loss
论文称这种方法为PatchGAN(如果分成的图像块是1×1 的像素点,则称其为PixelGAN;如果之分成1个图像块,则称其为ImageGAN)
6. CycleGAN
2017年ICCV的论文:Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks
代码实现:
模型结构
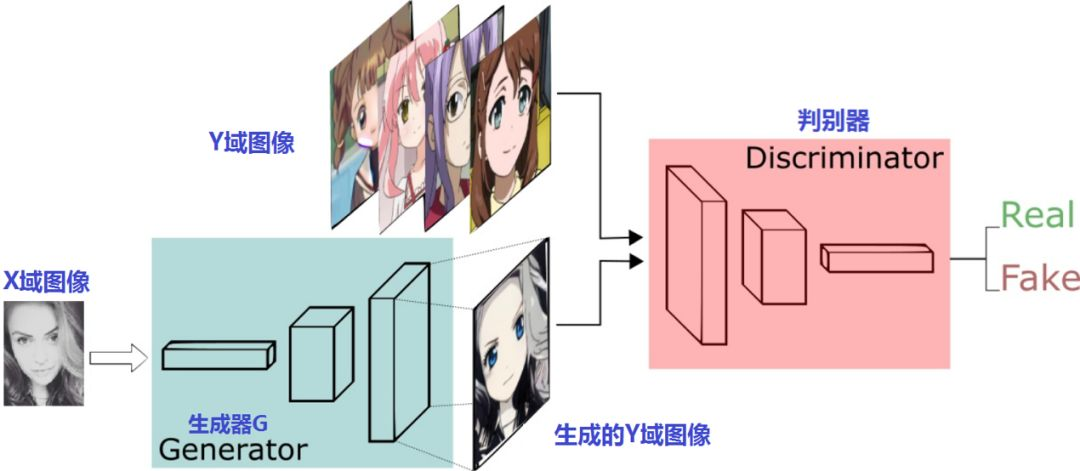
这篇论文同样是用于图像翻译任务,其最大的亮点是,不要求训练样本要成对出现,即提供一种通过无监督学习(准确来说是半监督学习?因为还是需要预先将样本分成两部分)来解决图像翻译任务的方法。
将\(X\)转换成\(Y\)后,再将\(Y\)转换成 \(\hat X\),如果 \(X=\hat X\),则称其为具有循环一致性(cycle consistency)的特性
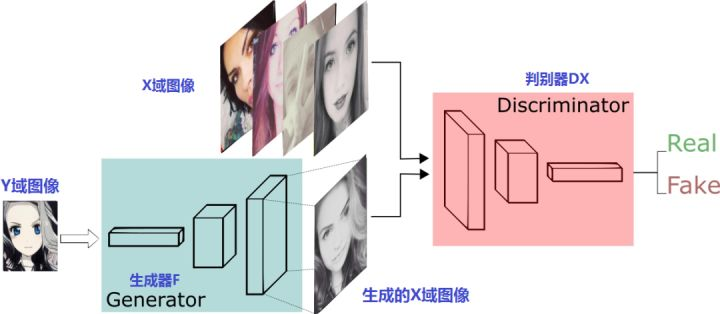
根据这一想法,如下图所示
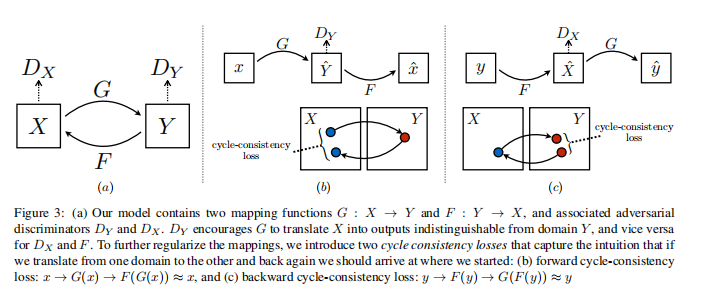
论文设计了两个生成器 \(G\) 和 \(F\),分别负责将将\(X\)转换成\(Y\)和将\(Y\)转换成 \(X\);对应的也有两个判别器,其输出分别为 \(D_X=D(F(y))\) 和 \(D_Y=D(G(x))\)
设计思路看上去还是很简单,就是将一个原始GAN网络复制两份,然后将两个GAN生成器的两个输入相互调换,对称式训练,最后再将两部分联合求解即可。但实际上,由于网络交错复杂,还是很容易把人绕晕的
生成器模型的损失函数为 \[ \begin{aligned} \mathcal{L}\left(G, F, D_X, D_Y\right) =&\mathcal{L}_{\mathrm{GAN}}\left(G, D_Y, X, Y\right) +\mathcal{L}_{\mathrm{GAN}}\left(F, D_X, Y, X\right) +\lambda \mathcal{L}_{\mathrm{cyc}}(G, F) \\ \mathcal{L}_{\mathrm{GAN}}\left(G, D_Y, X, Y\right) = & \mathbb{E}_{y \sim p_{\text {data }}(y)}\left[\log D_Y(y)\right]+\mathbb{E}_{x \sim p_{\text {data }}(x)}\left[\log \left(1-D_Y(G(x))\right)\right] \\ \mathcal{L}_{\mathrm{GAN}}\left(F, D_X, Y, X\right) = & \mathbb{E}_{x \sim p_{\text {data }}(x)}\left[\log D_X(x)\right]+\mathbb{E}_{y \sim p_{\text {data }}(y)}\left[\log \left(1-D_X(F(y))\right)\right] \\ \mathcal{L}_{\mathrm{cyc}}(G, F) = & \mathbb{E}_{x \sim p_{\text {data }}(x)}\left[\|F(G(x))-x\|_1\right] + \mathbb{E}_{y \sim p_{\text {data }}(y)}\left[\|G(F(y))-y\|_1\right] \end{aligned} \] 其中,\(\mathcal{L}_{\mathrm{cyc}}\) 为正则项
上面 \(\mathcal{L}_{\mathrm{GAN}}\) 论文中第一项给出的是 \(\mathbb{E}_{y \sim p_{\text {data }}(y)}\left[\log D_Y(y)\right]\),但阅读官方的源码时发现,使用的是 \(\mathbb{E}_{y \sim p_{\text {data }}(y)}\left[\|\|G(y)-y\|_1\right]\)
7. PGGAN(ProGAN)
ICLR 2018年的论文:Progressive Growing of GANs for Improved Quality, Stability, and Variation
官方代码:https://github.com/tkarras/progressive_growing_of_gans
该论文主要提供了一个生成高分辨率图像的解决方案
7.1. progressive train
论文认为,既然很难一次性生成高质量的高分辨率图片,那么可以由浅入深,先训练可以生成高质量的低分辨率的图片的GAN。训练完成后,在此基础上,添加一些网络中间层,加深网络,然后训练可以生成更高分辨率的GAN。按此一步步的训练出可以生成高质量的高分辨图片的GAN
但直接添加层,会使得模型训练不稳定,所以论文提出一种如下渐进式的增加网络深度的结构
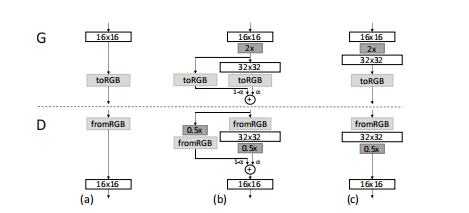
其中,\(\alpha \in [0,1]\) 是权重因子,初始化为0,表示该层不存在,然后随迭代次数增加, 直到增大到为1,表示该层被完全添加到网络中。
7.2. Minibatch standard deviation
在ImprovedGAN中,为了增加生成样本的多样性,提出了Minibatch discrimination的技巧,但PGGAN认为这太复杂了,所以直接简化为Minibatch standard deviation操作。其做法很简单,就是对每个minibatch的样本计算每一个特征(即沿通道方向计算)的标准差和方差,得到一个和特征图同样大小的矩阵,然后直接拼接,作为特征图的一个通道进行输出
7.3. equalized learning rate
通过 \(w_i = w_i /c\) 动态控制网络的权重,其中 \(c\) 为何凯明初始化常数(He’s initializer)
7.4. pixel-normalization
为了防止生成器和判别器恶性竞争,导致系统失控,在生成器的每个卷积操作后,添加如下的pixel-normalization操作 \[ b_{x, y}=\frac{a_{x, y}} {\sqrt{\frac{1}{N} \sum_{j=0}^{N-1}\left(a_{x, y}^j\right)^2+\epsilon} } \]
8. StyleGAN
2019年的论文:A Style-Based Generator Architecture for Generative Adversarial Networks
代码实现:
生成器网络结构图
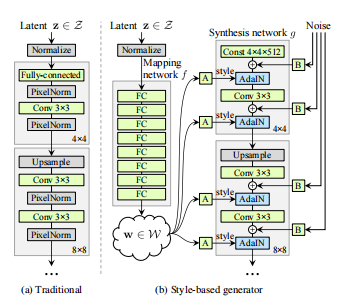
PGGAN作者的另一作品,StyleGAN也套用了PGGAN渐进式的训练策略。
该论文最大的贡献是,提出了噪声可以从生成器的任意中间层中加入,强化并细化了噪声对网络的影响,从而更好的控制图片的一些细节部分的生成
注:个人认为这种方式其实和CGAN很很像,就是把噪声当成条件进行输入。
8.1. Mapping Network
论文认为每一种风格(style)都可以由隐空间中一维向量决定,所以如果可以将隐空间进行解纠缠(disentangled),得到特定风格的控制变量表示,就可以生成具有对应风格特征的图片。
论文通过名为映射网络(Mapping Network,即一系列的全连接层)的结构,将原始的隐变量 \(z\) 映射为控制变量 \(w\)
8.2. AdaIN
论文通过一个名为自适应实例规范化(adaptive instance normalization,AdaIN)的模块,将控制变量 \(w\) 和每个生成器中间层的输出 \(x\) 进行耦合
在耦合前,还需要将 \(w\) 变换成风格 \(y= (y_s,y_b)\) (论文并没有给出 \(w\) 转换成 \(y\) 的方式,结合网上相关的资料,猜测是添加一层全连接层),然后进行如下计算 \[ \operatorname{AdaIN}\left(\mathbf{x}_i, \mathbf{y}\right)=\mathbf{y}_{s, i} \frac{\mathbf{x}_i-\mu\left(\mathbf{x}_i\right)}{\sigma\left(\mathbf{x}_i\right)}+\mathbf{y}_{b, i} \] 上式原理很简单,就是对 \(x\) 标准化后,进行一次线性变换。
8.3. Const input
论文认为,既然生成器每个中间层的输入都会受 \(A\) 的影响,生成器的输入其实已经无关重要了,所以使用一个固定常量作为输入即可
8.4. Random noise
论文还在每个中间层的输出与一个随机的噪声 \(B\) 进行相加,用来控制一些随机的微小特征的生成,使生成的图片更加多变及真实。
9. SAGAN
2018年的论文:Self-Attention Generative Adversarial Networks
官方代码:https://github.com/brain-research/self-attention-gan
9.1. Non-local Neural Networks
SAGAN生成器使用的是论文Non-local Neural Networks中提出的结构,这是一个attention+残差的模块
首先输入接入一个典型的attention结构

对应的表达式 \[ v(x) = \text{Attention}(f(x),g(x),h(x)) = \text{softmax}\left(f(x)g(x)^{\top}\right)h(x) \\ h(x) = W_h x \\ f(x) = W_f x \\ g(x) = W_g x \\ \] 然后再接上一个残差结构,便是Non-local Neural Networks的输出了 \[ y = \gamma (W_v v(x)) + x \]
9.2. hinge损失
损失函数采用hinge损失,这算是一个创新点 \[ \begin{aligned} L_D & =-\mathbb{E}_{(x, y) \sim p_{\text {data }}}[\min (0,-1+D(x, y))]-\mathbb{E}_{z \sim p_z, y \sim p_{\text {data }}}[\min (0,-1-D(G(z), y))] \\ L_G & =-\mathbb{E}_{z \sim p_z, y \sim p_{\text {data }}} D(G(z), y) \end{aligned} \]
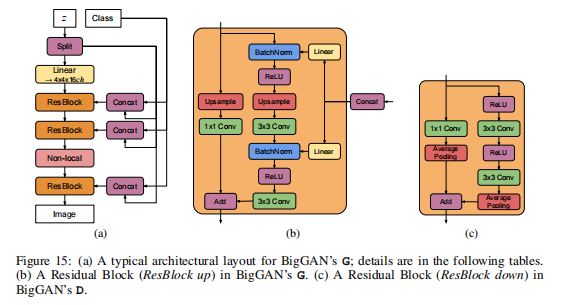
10. BigGAN
DeepMind 2019年的论文:Large Scale GAN Training for High Fidelity Natural Image Synthesis
10.1. large model
BigGAN在SAGAN的基础上,通过实验发现,增大batch size的大小(最终增大至2048)、增大生成器中间层的通道数(最终比原来增大了50%)以及增加网络深度(最终网络参数达16亿),可以显著提升模型的效果。一言蔽之,大力出奇迹。
除了加大网络参数,还参考了ProGAN,加入一个类别条件参数,并且该参数可以在生成器的任意中间层中加入,使其可以生成指定类别的图像
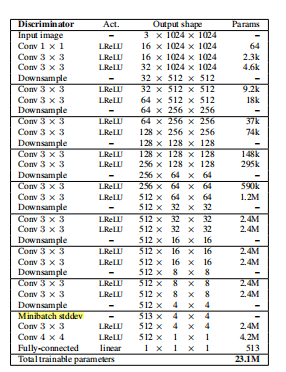
下面贴出来的是基础BigGAN结构图,论文中还有BigGAN-deep的结构图,这里就不一一贴出来了
10.2. truncation trick
论文认为噪声不一定只能是标准正态分布或者均匀分布,所以采用一种名为截断技巧(truncation trick,即设定一个阈值,当采样数据大于该阈值时,则重新采样)的处理手段,对标准正态分布进行截断采样。
通过实验,论文发现随着截断阈值的下降,图像的质量会逐渐提高,图像的多样性会逐渐下降。这个结果是符合主观猜测的。
论文还发现,一些大型的模型采用截断技巧后,会出现饱和伪影(saturation artifacts)的现象。论文认为这是因为噪声 \(z\) 没有投影到整个样本空间,所以加入了如下正则项,使噪声强制与样本正交,以投影到整个样本空间 \[ R_\beta(W)=\beta\left\|W^{\top} W \odot(\mathbf{1}-I)\right\|_{\mathrm{F}}^2 \]
10.3. characterizing instability
论文还发现了有一些层在训练过程中会出现参数爆炸的情况,通过对生成器参数更新范围的限制(具体公式请查看原论文),实验结果分析认为,这一种现象是无法避免的;通过对判别器添加不同的正则项(具体正则项请查看原论文),实验结果分析认为,对判别器的惩罚力度越大,模型的性能越稳定,但训练成本也越高,且图像生成质量也越差。
另外,论文中还介绍了很多调参的技巧,这里就不展开介绍了。
11. 其他GAN变种
GAN的变种实在太多,下面列个待读清单,后面有时间再补吧
11.1. PACGAN
2017年的论文:PacGAN: The power of two samples in generative adversarial networks
官方代码:https://github.com/fjxmlzn/PacGAN
主要提出了一些缓解模式坍塌问题的技巧
11.2. WGAN-GP
2017年的论文:Improved Training of Wasserstein GANs
官方代码:https://github.com/igul222/improved_wgan_training
WGAN的续作,论文认为使用weight clipping来近似不太合理,应改为使用gradient penalty(GP)
11.3. pix2pixHD
2017年的论文:High-Resolution Image Synthesis and Semantic Manipulation with Conditional GANs
官方代码:https://github.com/NVIDIA/pix2pixHD
Pix2pix的改进版,解决高分辨率场景下的生成图像模糊的问题
11.4. Vid2Vid
2018年的论文:Video-to-Video Synthesis
11.5. SeqGAN
2017年的论文:SeqGAN: Sequence Generative Adversarial Nets with Policy Gradient
11.6. StackGAN
2017年的论文:StackGAN: Text to Photo-realistic Image Synthesis with Stacked Generative Adversarial Networks