基于numpy的实现代码传送门
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一种基于密度的聚类算法。
1. 输入输出
Input:
样本空间 \[ X= \{x_1, x_2, ..., x_N\},x_i \in \mathbb{R}^n \] 先验参数 \((\epsilon,MinPts)\)
Output:
样本空间中每个点的预测类别 \[ Y=\{y_1,y_2,...,y_{N}\},y_i \in \{0,1,...,k\} \] 类簇集合 \[ C=\{C_1,C_2,...C_k\},C_i=\{x \in X | y = y_i \} \]
2. 模型效果
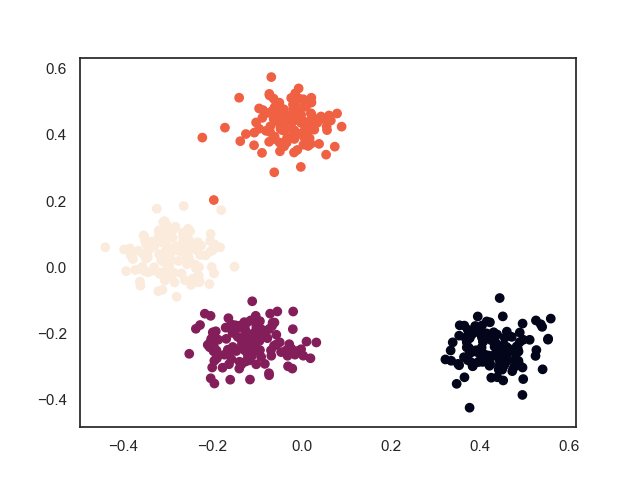
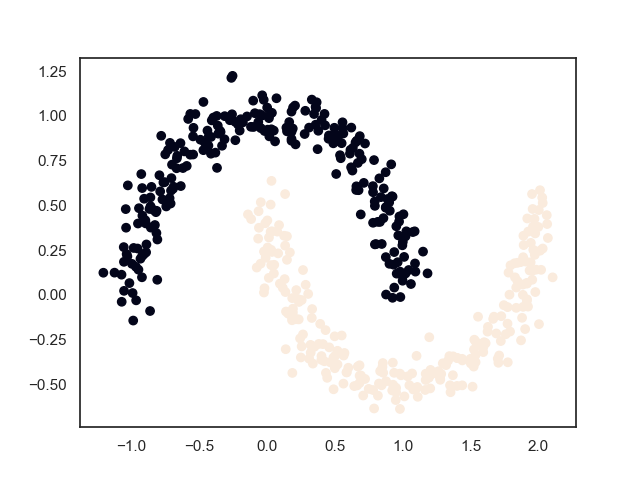
2.1. 训练效果
上面过程中可以看出,与层次聚类算法“雨后春笋”般的聚类过程不一样,DBSCAN算法的聚类过程是“拉帮结社”式地进行,总是将范围内紧密联系的样本点连接在一团,然后团与团之间再进行兼并。
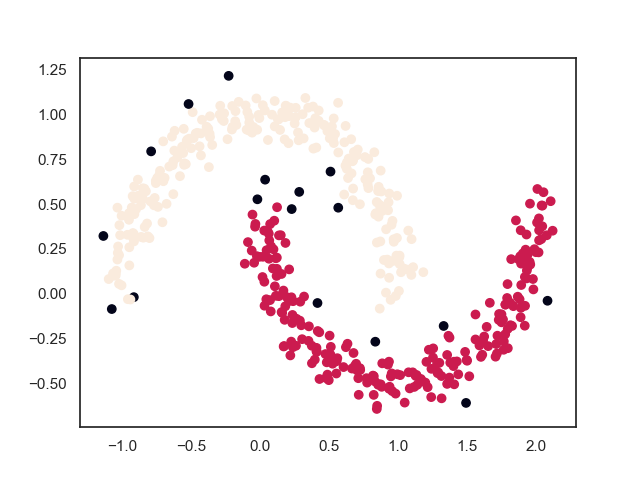
2.2. 最终结果
3. 相关概念
- \(\epsilon\) 邻域,对于任意一点 \(x_j\) ,该点的 \(\epsilon\) 邻域定义为样本空间间所有与 \(x_j\) 的距离不大于 \(\epsilon\) 的样本,即 \(N_{\epsilon}(x_j) = \{ x_i \in X|dist(x_i, x_j) \leq \epsilon \}\)
- 密度,\(x\) 的 \(\epsilon\) 邻域的样本的数量,即 \(\rho(x) = |N_{\epsilon}(x)|\)
- 核心点(core point),\(\rho(x) \geq MinPts\) 的样本点
- 边界点(border point),\(\rho(x) < MinPts\) 且 \(x\) 落在任意一个核心点的 \(\epsilon\) 邻域的样本点
- 噪声点(noisy point),既非核心点也非边界点的样本点
- 密度直达,\(x_j\) 位于 \(x_i\) 的 \(\epsilon\) 邻域中,且 \(x_i\) 为核心点,则称 \(x_j\) 由 \(x_i\) 密度直达
- 密度可达,对 \(x_j\) 和 \(x_i\) ,若存在一系列点 \(p_1,...,p_n\) ,使得 \(p_1=x_i,p_n=x_j\) ,且 \(p_{i+1}\) 由 \(p_i\) 密度直达,则称 \(x_j\) 由 \(x_i\) 密度可达
- 密度相连,对 \(x_j\) 和 \(x_i\) ,若存在 \(x_k\) ,使得 \(x_j\) 和 \(x_i\) 均由 \(x_k\) 密度可达,则称 \(x_j\) 和 \(x_i\) 密度相连
下图形象地给出上面各种概念
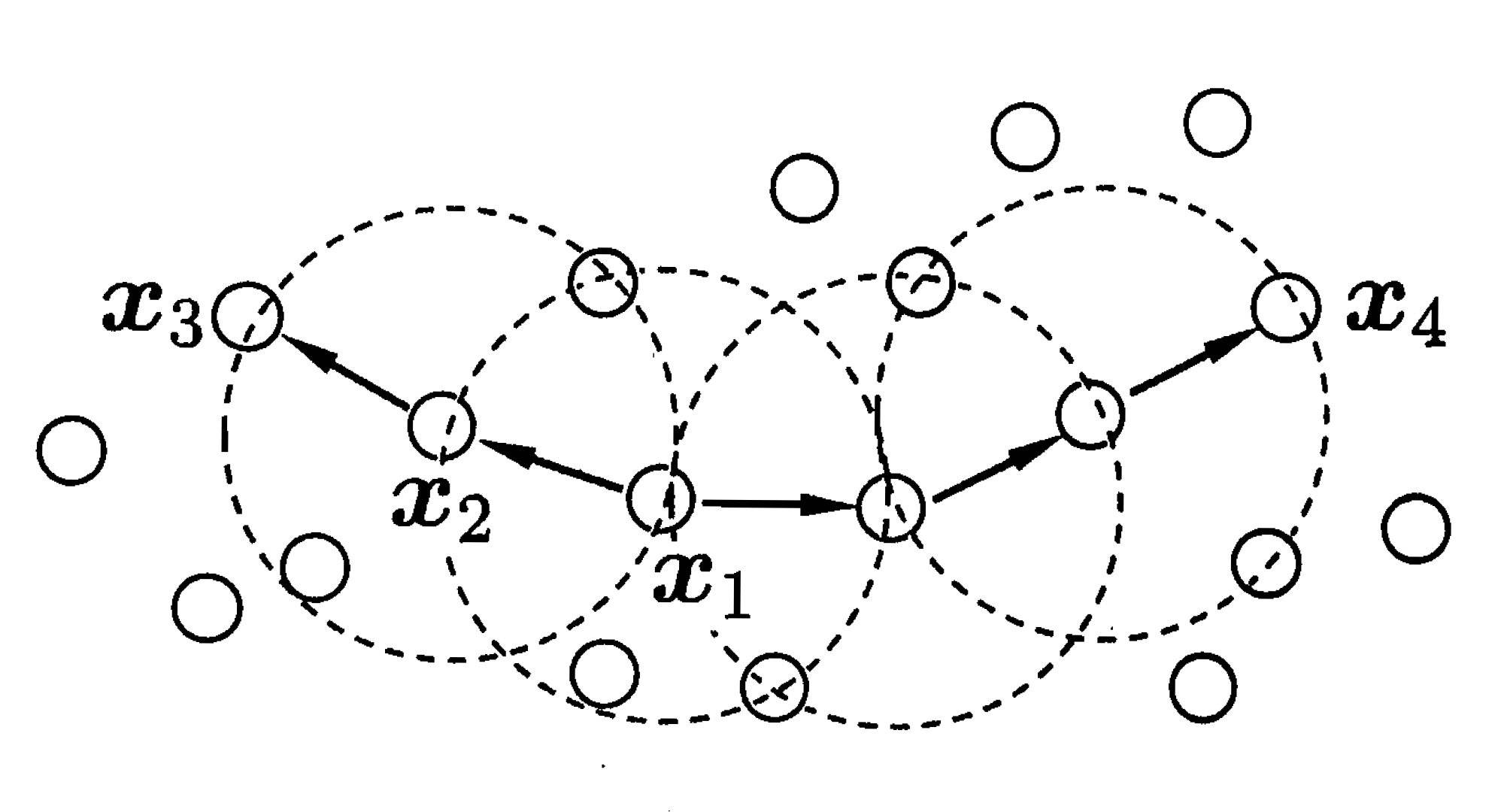
其中,\(MinPts=3\),虚线部分为对应中心点的 \(\epsilon\) 邻域,\(x_2\) 由 \(x_1\) 密度直达,\(x_3\) 由 \(x_1\) 密度可达,\(x_3\) 和 \(x_4\) 密度相连
4. 学习算法
DBSCAN算法的核心思想是从某个核心点出发,不断向密度可达的区域扩张,从而得到一个包含核心点和边界点的最大化区域,区域中任意两点密度相连。
关于该算法的核心思想的描述,还有一个形象生动的有趣比喻:将其类比成诸侯分封的过程。
样本空间中的每一个点看作是奴隶社会中的一个士人(point)。
当一个士人的势力范围(\(\epsilon\)邻域)中的其他士人的数量超过一定的数量(MinPts)时,士人便发展成为一个士族(core point);如果一个士人的势力范围内其他士人的数量没有超过阈值,但其属于其他士族的管辖范围内(依附于其他士族)时,则将其作为该士族的门客(border point);既不是士族也不是门客的士人则成为游离的说客(noisy point)
多个关系紧密的士族联合在一起便形成了一个诸侯国(class),所有诸侯国便组成了一个天下(sample space)
具体的算法流程如下:
Init:
- 计算每个样本点 \(x_i\) 的 \(\epsilon\) 邻域 \(N_\epsilon(x_i)\)
- 初始化每个样本点 \(x_i\) 的类别标签 \(y_i=i\)
Repeat:
- 样本空间中的任意一点 \(x_i\),如果 \(\rho(x_i) \geq MinPts\) ,则将其归为核心点;反之,则跳过这次循环
- 寻找核心点 \(x_i\) 对应的簇 \(C_i=\{x \in X|y = y_i\}\)
- 对核心点 \(\epsilon\) 邻域中的每个样本点 \(x_j\) ,寻找其对应的簇 \(C_j=\{x \in X|y = y_j\}\),合并 \(C_i\) 和 \(C_j\) ,更新 \(C_j\) 中样本的标签为 \(\{y=y_i|x \in C_j \}\)(在更新的过程中,既包括核心点也包括了边界点)
Until: 所有的样本点都遍历一遍
End:
- 将非核心点或边界点的样本点归为噪声点,即将其标志值置为 \(-1\)
- 对输出标签重新排序编号
算法的时间复杂度为 \(O(N^2)\) ,资源主要消耗在初始化计算 \(\epsilon\) 邻域上,其本质思想为求最近邻,参考KNN算法,可以加入kd树或球树进行优化。
5. 参数确定
这个算法有两个非常重要的先验参数 \((\epsilon,MinPts)\) 需要确定,但因为样本空间的数据分布、数据维度等不一样,这两个参数并没有推荐的取值范围,而且往往也是很难去确定的。下面介绍一种我常用的方法:
计算 \(x_i\) 对其他样本的距离,并从小到大排序得到距离序列 \(d_i= \{d_{i,1}, ..., d_{i,N}\}\) ,取所有样本(如果样本数量较多时取部分样本)距离序列的第 \(2MinPts\) 个距离值的均值(如果噪声值过多或者与真实值相差较大时,取中位值)作为 \(\epsilon\) 值,即 \[ \epsilon = \frac{1}{N} \sum_{i=1}^N d_{i,2MinPts} \] 这种做法可以保证绝大多数点不会被归为噪声值,同时也在一定程度上保留模型排除噪声点的能力。
而 \(MinPts\) 一般取较小的值,sklearn中建议的默认取值为5,所以可以在5上下取值进行尝试。
6. references
《机器学习》9.5节,周志华
Nice job~