K近邻(K-nearest neighbour, KNN)是一种基于距离计算的分类算法。
基于numpy的实现代码传送门
1. 输入输出
训练输入: \[ T=\{(x_1,y_1), \cdots,(x_N,y_N)\} \] 其中,
- \(x\) 为特征域,\(x_i \in \mathbb{R}^{n},i =1,2,...,N\)
- \(y\) 为标签域,\(y_i \in \{c_1,\cdots,c_K\}\) ,\(K\) 为输出标签集合大小。
测试输入 \[ X'=\{x'_1, \cdots ,x'_{N'}\},x'_i \in \mathbb{R}^n \] 测试输出: \[ Y'=\{y'_1,\cdots,y'_{N'}\},y_i' \in \{c_1,\cdots ,c_K\} \]
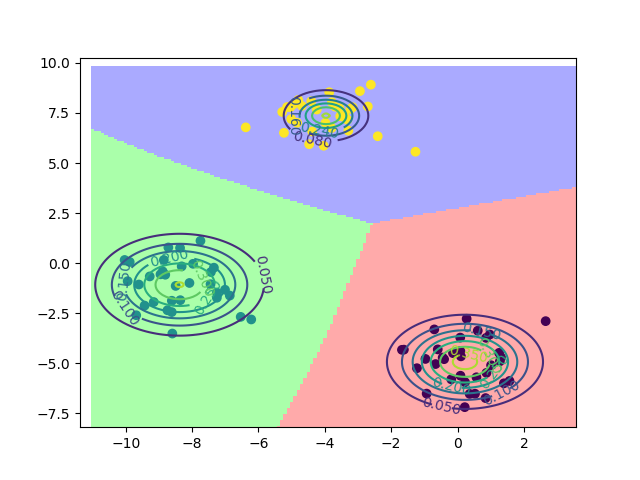
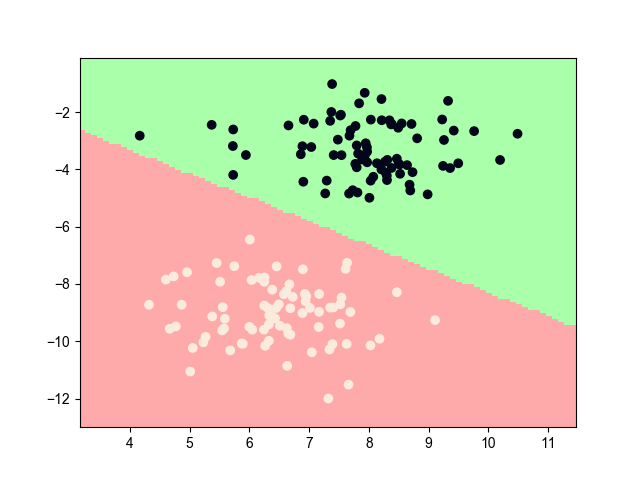
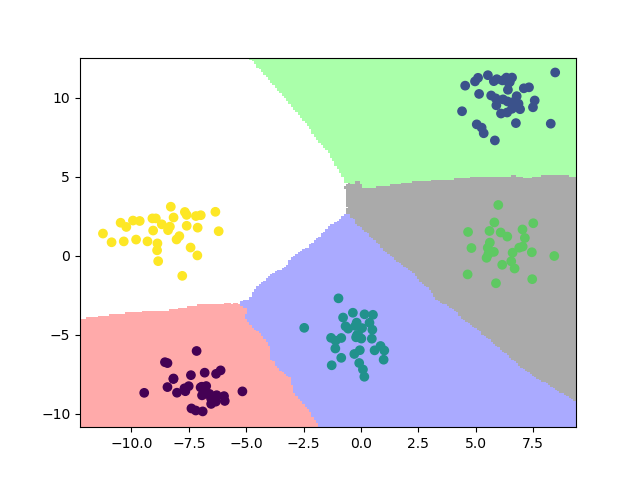
2. 模型效果
3. 模型推导
3.1. 基本方法
由于KNN是典型的lazy learning算法,不存在训练过程,只有当预测的时候才会进行“学习”。故直接看测试集的预测过程即可。
模型预测也相当简单,对于输入的测试样例 \(x\),计算其与训练中所有点的距离,筛选出距离距离最近的前 \(k\) 个点,记为 \(N(k)\)。统计 \(N(k)\) 中出现次数最多的类别 \(y\),作为测试样例的预测值。即模型的函数为 \[ f(x)=\arg \max_{c_j} \sum_{x_i \in N_k(x)} I(y_i=c_j),i=1,2,...,N;j=1,2,...,K \]
3.2. 距离函数选择
3.2.1. \(L_p\) 距离(Minkowski距离)
\[ L_p(x_i,x_j)=(\sum_{l=1}^n |x_i^{(l)}-x_j^{(l)}|^p)^{\frac{1}{p}} \]
- \(p=2\) 时为 \(L_2\) 距离,即欧氏距离
- \(p=1\) 时为\(L_1\) 距离,即曼哈顿距离
- \(p= \infty\) 时为各个坐标距离的最大值
该距离函数体现了数值上的绝对差异
3.2.2. 余弦距离
\[ \cos(\theta) = \frac{\sum_{i=1}^n A_i B_i}{\sqrt{\sum_{i=1}^n A_i^2 \cdot \sum_{i=1}^n B_i^2}} \]
该距离函数体现方向上的相对差异
3.3. k值选择
k值较小,“学习”的近似误差变小,但对噪声点敏感,意味着整体模型变得复杂,容易过拟合
k值较大,减少“学习”的估计的误差,但近似误差也会变大,模型很可能学不到东西,意味着整体模型变得简单。
如果模型较简单,就会忽略训练集中大量有用的信息,所以两者权衡下,应取较小的k值。通常使用交叉验证法来选取最优的k值。
3.4. 搜索算法优化
如果采用上面的线性扫描的方法,当k远小于N时,许多点的计算是没用的。为了减少计算次数,提高搜索效率,提出了kd树的存储结构。
kd树是一棵二叉树,对于输入 \(x_i=(x_i^{(1)},x_i^{(2)},...,x_i^{(l)})\) ,构建流程如下:
- 选取 \(x_i^{(1)}\) 作为划分坐标轴,并寻找其中位数,将该点作为主节点,小于切分点的划分到做节点区域,反之,则划分到右节点区域
- 选取 \(x_i^{(2)}\) 作为划分坐标轴,分别对左右区域重复步骤1的划分方法
- 一直选取下一坐标轴,如果到了 \(x_i^{(l)}\),则重新从 \(x_i^{(1)}\) 开始,直到所有的区域只有一个点,则kd树构建完毕
特别地,划分点不一定需要选取中位数,选取中位数并不会提高搜索的效率,但会提升空间的存储的效率,因为这样得到的二叉树是平衡的。
一棵建成的kd树样例如下:
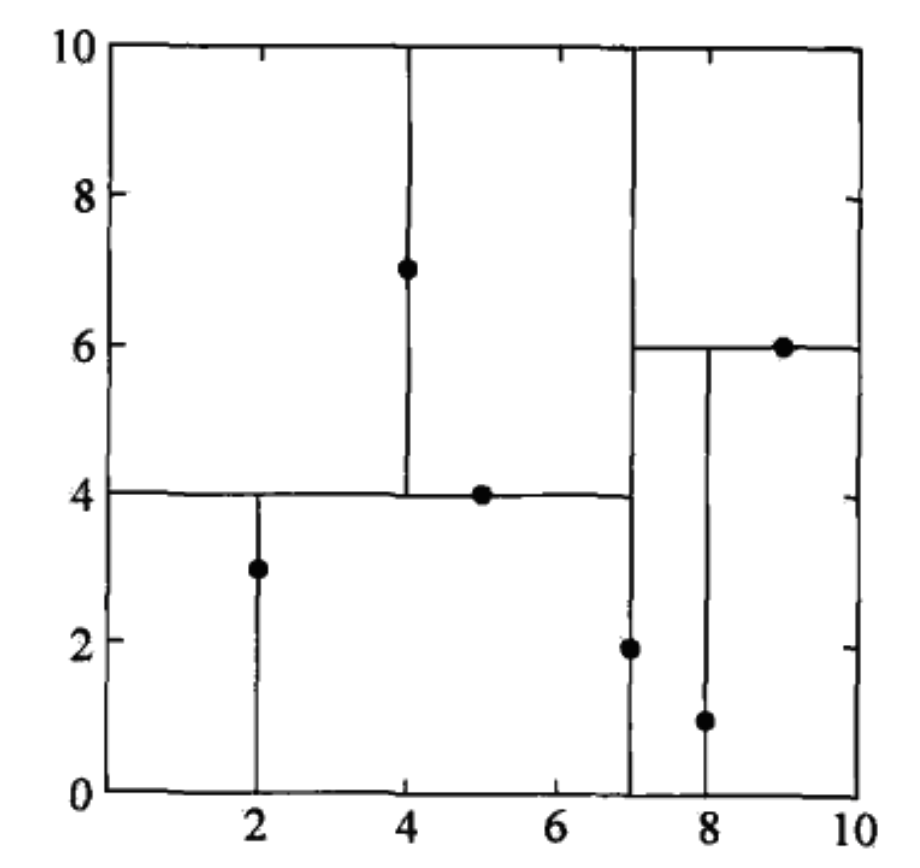
对于输入测试样例 \(x\),k近邻的搜索流程如下:
- kd树中找到包含 \(x\) 的叶子节点(\(x\) 当前维的坐标小于当前节点的坐标,则 \(x\) 包含在当前节点的左节点区域,反之,则包含在当前节点的右节点区域),计算 \(x\) 和叶子节点的距离。
- 如果 \(N(k)\) 的元素的数量小于 \(k\) ,则直接加入当前节点,或当前距离小于\(N(k)\) 中的最大距离,则去掉\(N(k)\) 中距离最大的点,加入当前节点。
- 递归向上回退,将当前节点的父节点作为当前节点。
- 计算当前节点与 \(x\) 的距离,重复步骤2;判断当前节点的子节点的区域是否与 \(x\) 相交(如果 \(x\) 当前维的坐标与当前节点的当前维坐标的差值小于小于\(N(k)\) 中的最大距离,则 \(x\) 与当前节点的左子节点的区域相交;如果当前节点的当前维坐标与 \(x\) 当前维的坐标的差值小于小于\(N(k)\) 中的最大距离,则 \(x\) 与当前节点的右子节点的区域相交),如果相交,则该将子节点作为当前节点,重复步骤4,反之,则重复步骤3-4,直到回退至根节点, \(N(k)\) 即为k近邻点集。
搜索的平均时间复杂度为 \(O(\log N)\),适用于实例数远大于维度的情况。
4. references
《统计学习方法》第3章,李航
Enjoy the time~